Debes acceder para ver éste contenido. Por favor Acceder. ¿Aún no eres miembro? Únete a nosotros

Publicación by Maqui is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 Internacional
Reportar


En la reparación de equipos electrónicos, varias veces necesitamos comprobar el estado de la aislación de condensadores, en especial,...
En los años 80 una asociación de técnicos de una localidad colombiana decidió que era necesario tener un Día...
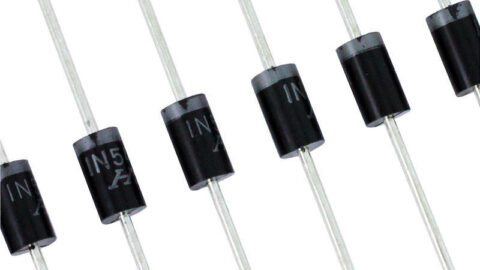
Una resistencia SMD es un tipo de resistencia que ha sido diseñada para montarse en la superficie. Estas resistencias...
Debes acceder para ver éste contenido. Por favor Acceder. ¿Aún no eres miembro? Únete a nosotros
aprende hacer tu reloj digital con contadores digitales y compuerta logica
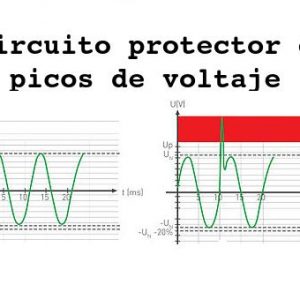
Este sencillo circuito protector de picos de voltaje permite retardar un voltaje de alimentación y evitar que éste llegue inmediatamente...
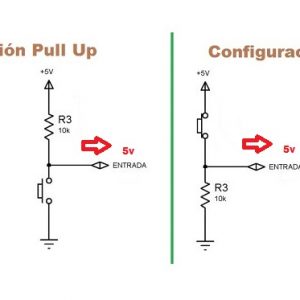
La configuración Pull-Up y Pull-Down son resistencias colocadas en una forma determinada que establecen un estado lógico a la...
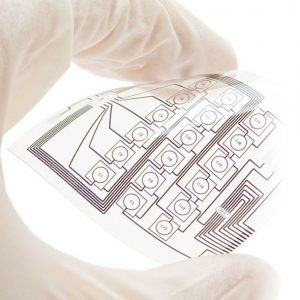
Para mejorar este proceso los ingenieros eléctricos de la Universidad de Duke han desarrollado una técnica totalmente impresa en...






{kind=link}