Debes acceder para ver éste contenido. Por favor Acceder. ¿Aún no eres miembro? Únete a nosotros

Publicación by Ditecno Digital is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 Internacional
Reportar

Debes acceder para ver éste contenido. Por favor Acceder. ¿Aún no eres miembro? Únete a nosotros
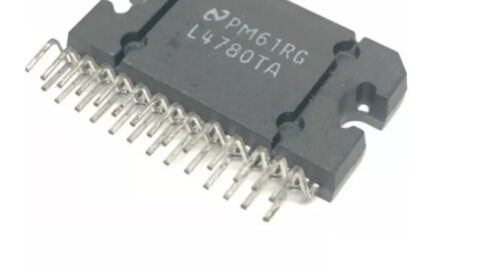
Este es un integrado amplificador de audio estéreo capaz de entregar típicamente 60W por canal de potencia de salida...
En nuestros comienzos con Arduino queremos hacer como nuestro prender y apagar un led, bueno este tutorial va...
Se ha lanzado un nuevo IDE siglas en Ingles del "Entorno de Desarrollo Integrado" donde el código abierto Arduino...
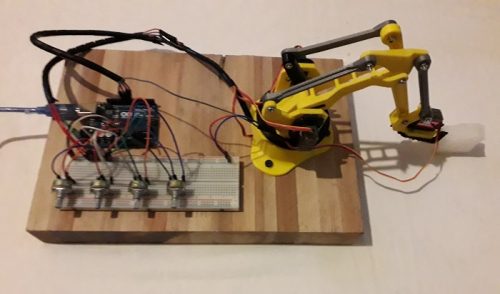
El propósito de esta publicación es explicar mis pruebas con este modulo HC05 paso a paso , mostrando que...
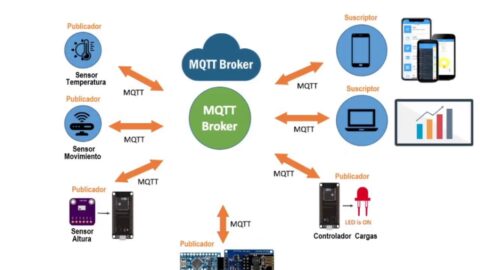
En este tutorial explicaremos como controlar dispositivos eléctricos de la casa desde un smartphone, cualquier electrodoméstico que funcione a...
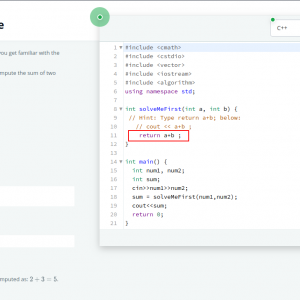
He visto mucho en redes sociales y foros la siguiente petición de algunos usuario, pasame o subi el código,...
Cuando queremos tener la hora actual en cualquier momento este proyecto nos servirá en todos los proyectos donde necesitemos...







{kind=link}