Debes acceder para ver éste contenido. Por favor Acceder. ¿Aún no eres miembro? Únete a nosotros

Publicación by Luciano is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 Internacional
Reportar

Hola Makers hoy les traigo un tutorial sobre como instalar Kali Linux en Raspberry Pi.
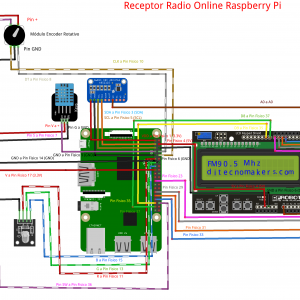
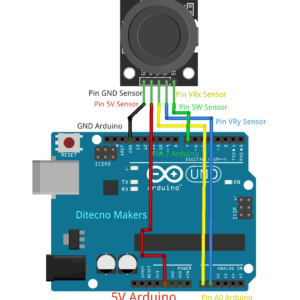
En este tutorial haremos una radio de estilo clásica con dial, pero con radios online, con Raspberry Pi como...
Debes acceder para ver éste contenido. Por favor Acceder. ¿Aún no eres miembro? Únete a nosotros
Debes acceder para ver éste contenido. Por favor Acceder. ¿Aún no eres miembro? Únete a nosotros
El proceso de instalación se ha simplificado mucho desde el lanzamiento de la Raspberry Pi gracias a la aparición...
Para configurar una IP estática en Raspberry Pi funcionando con sistema operativo Raspbian a través de la consola de...
Debes acceder para ver éste contenido. Por favor Acceder. ¿Aún no eres miembro? Únete a nosotros




{kind=link}