Debes acceder para ver éste contenido. Por favor Acceder. ¿Aún no eres miembro? Únete a nosotros

Publicación by Luciano is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 Internacional
Reportar


Debes acceder para ver éste contenido. Por favor Acceder. ¿Aún no eres miembro? Únete a nosotros
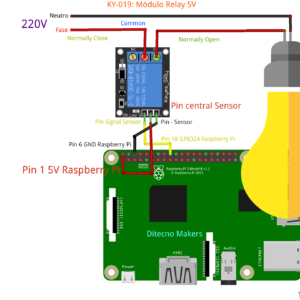
Cuarta parte de los módulos para Arduino y Raspberry Pi Ky-016 a Ky-020, Diagramas Fritzing y programación en ambas...
LibreOffice es un paquete de Oficina que se puede instalar fácilmente en Raspbian. No es una solución “perfecta”, pero...
Tutorial LCD keypad Shield para Raspberry pi y Arduino con DHT11 y botones que abren sitios web
Hola Makers hoy les traigo un tutorial sobre como instalar Kali Linux en Raspberry Pi.
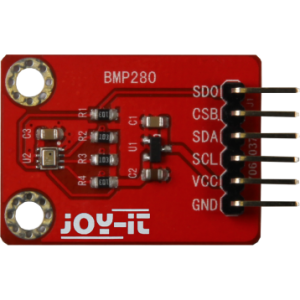
En este tutorial te muestro el sensor de temperatura y Presión atmósferica de Bosch, su conexión en Arduino y...







{kind=link}