Debes acceder para ver éste contenido. Por favor Acceder. ¿Aún no eres miembro? Únete a nosotros

Publicación by Luciano is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 Internacional
Reportar

Debes acceder para ver éste contenido. Por favor Acceder. ¿Aún no eres miembro? Únete a nosotros
En este tutorial te explico todas las formas de instalar una distribución en tu Raspberry Pi!
Este será un tutorial donde voy a explicar todos y cada uno de los pasos, para configurar y programar...
En este tutorial transformaremos nuestra Raspberry Pi en un Servidor de musica con Spotify Premium
Muchos estábamos anticipando que una nueva placa llevaría tiempo, por lo que la mayoría de las personas realmente no...
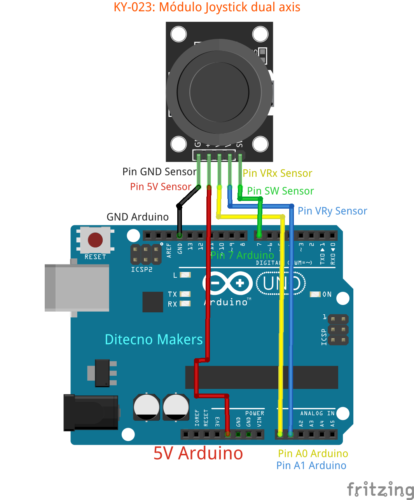
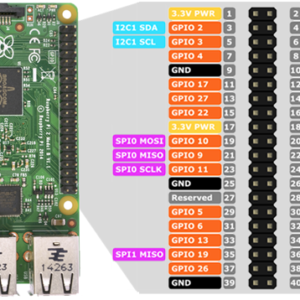
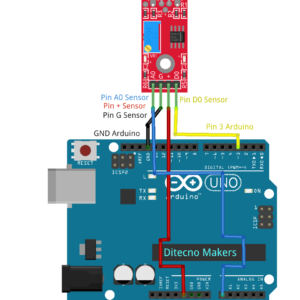
Sexta parte de la guía de módulos para Arduino y Raspberry Pi, con diagramas de conexión Fritzing, y programación...







{kind=link}