Debes acceder para ver éste contenido. Por favor Acceder. ¿Aún no eres miembro? Únete a nosotros

Publicación by Manosalva is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 Internacional
Reportar


Este es un integrado amplificador de audio estéreo capaz de entregar típicamente 60W por canal de potencia de salida...
Qualcomm Technologies y Arduino han liberando su primer producto en colaboración de ambas compañías. Hablamos del nuevo Arduino UNO...
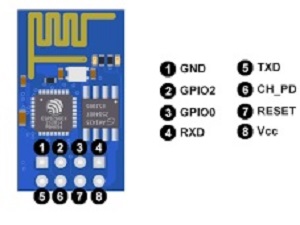
Este dispositivo (ESP8266) captura la dirección IP de su red y la publica en el sitio de DNS (Servidor de...
Cuatro pasos para usar Arduino/ESP32 profesionalmente.
En esta oportunidad explicare como conectar más de un servomotor controlado por un joystick que puede ser util para...
Debes acceder para ver éste contenido. Por favor Acceder. ¿Aún no eres miembro? Únete a nosotros
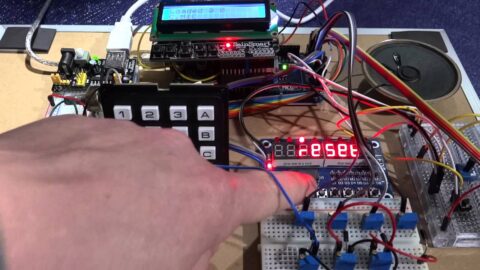
Tutorial para realizar un tester básico de frecuencia de audio.Para verificar el desempeño de un dispositivo en frecuencias...
Siempre nos llamo la atención los brazos roboticos entonces dije porque no armar un prototipo del mismo, ¡¡manos a...







){kind=link}