Debes acceder para ver éste contenido. Por favor Acceder. ¿Aún no eres miembro? Únete a nosotros

Publicación by German is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 Internacional
Reportar

En estos tiempos donde la robótica y la programación esta en todos lados de la vida cotidiana es interesante...
En este tutorial veremos como realizar una alarma por activación de movimiento con el modulo sensor de movimiento PIR....
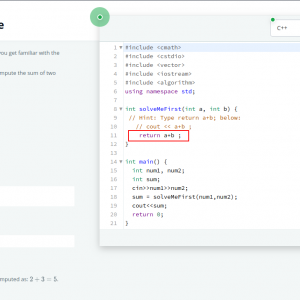
He visto mucho en redes sociales y foros la siguiente petición de algunos usuario, pasame o subi el código,...
Un relé es un dispositivo electromecánico que permite a un microcontrolador como Arduino controlar cargas a un nivel tensión...
En la actualidad el uso frecuente de los teléfonos móviles y ademas el tenerlos siempre a mano hace una...
El Ky 015 es un módulo especialmente diseñado para Arduino que te permitirá medir la temperatura y humedad...
El sistema OSI (Interconexión de Sistemas Abiertos) tiene 7 niveles que son: Físico, Enlace, Red, Transporte, Sesión, Presentación y...






{kind=link}