Debes acceder para ver éste contenido. Por favor Acceder. ¿Aún no eres miembro? Únete a nosotros

Publicación by Luciano is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 Internacional
Reportar

En esta publicación explicaremos con la trasmisor de celda de carga HX711 de 5 kg y un Arduino UNO,...
Conexiones del Display OLED GMG12864-06D Con Arduino
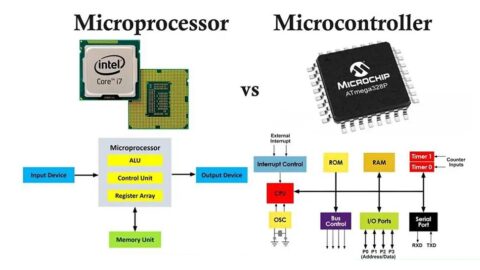
diferencias entre un sistema basado en un microprocesador y un microcontrolador
En nuestros comienzos con Arduino queremos hacer como nuestro prender y apagar un led, bueno este tutorial va...
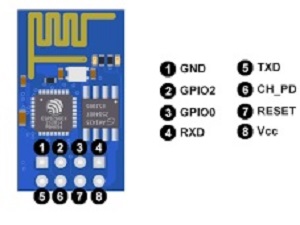
Este dispositivo (ESP8266) captura la dirección IP de su red y la publica en el sitio de DNS (Servidor de...
Poyecto donde arduino uno R3 valida la clave ingresada mediante un keypad y muestra los mensajes si es “Correcta...
El Ky 015 es un módulo especialmente diseñado para Arduino que te permitirá medir la temperatura y humedad...
El pasado sábado 19 de octubre a las 16.00 CET en Maker Faire Rome, Massimo Banzi y Luca Cipriani...







{kind=link}