Debes acceder para ver éste contenido. Por favor Acceder. ¿Aún no eres miembro? Únete a nosotros

Un higrómetro de suelo FC-28 es modulo que incorpora un sensor que releva la humedad que hay en el...
En este tutorial les enseñaremos a como realizar un reconocedor de huellas dactilares con arduino.El lector de huellas dactilares...
Utilizo el Ky036 que detecta cuando se presiona el sensor, este proyecto es una demostración del...
El propósito de esta publicación es explicar mis pruebas con este modulo HC05 paso a paso , mostrando que...
Tutorial para realizar un tester básico de frecuencia de audio.Para verificar el desempeño de un dispositivo en frecuencias...
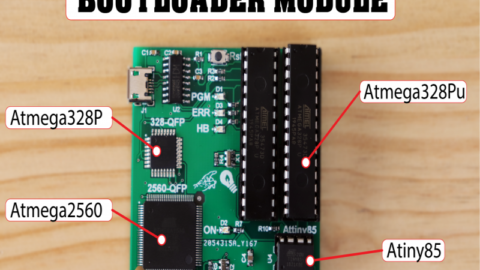
Normalmente, al trabajar con microcontroladores, alguna vez hemos usado tarjetas de desarrollo que cuentan con el microcontrolador embedido, es...
Debes acceder para ver éste contenido. Por favor Acceder. ¿Aún no eres miembro? Únete a nosotros
Debes acceder para ver éste contenido. Por favor Acceder. ¿Aún no eres miembro? Únete a nosotros







{kind=link}