Debes acceder para ver éste contenido. Por favor Acceder. ¿Aún no eres miembro? Únete a nosotros

Publicación by Ditecno Digital is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 Internacional
Reportar

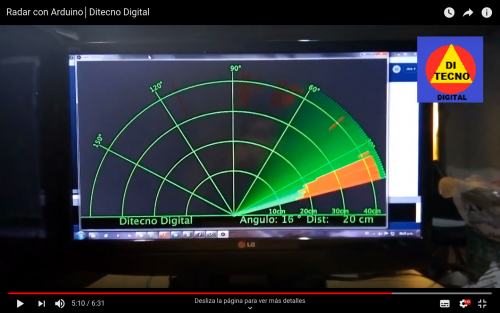
En esta ocación se verá como utilizar el Bluetooth HC-06 por medio de Arduino, se controlarán varios sensores desde una aplicación creada...
En este tutorial explicaremos como controlar dispositivos eléctricos de la casa desde un smartphone, cualquier electrodoméstico que funcione a...
Un higrómetro de suelo FC-28 es modulo que incorpora un sensor que releva la humedad que hay en el...
Cuantos de ustedes quieren ordenarle a una pc que prenda y apaguelas luces? bueno yo lo consegui solo modificando...
Cuatro pasos para usar Arduino/ESP32 profesionalmente.
Un relé es un dispositivo electromecánico que permite a un microcontrolador como Arduino controlar cargas a un nivel tensión...
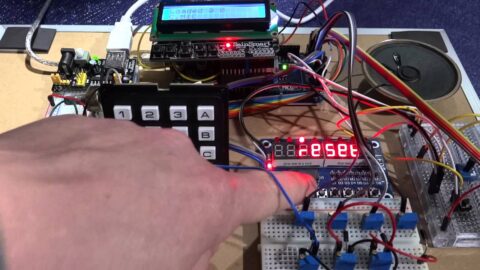
Como podemos hacer un medidor de carga de baterías y pilas. Lo haremos a través usando un circuito con...
Cuando queremos tener la hora actual en cualquier momento este proyecto nos servirá en todos los proyectos donde necesitemos...








{kind=link}