Debes acceder para ver éste contenido. Por favor Acceder. ¿Aún no eres miembro? Únete a nosotros


El propósito de esta publicación es explicar mis pruebas con este modulo HC05 paso a paso , mostrando que...
El sensor de infrarrojos está conformado en su función básica por un LED que emite pulsos de luz infrarroja...
El popular fabricante de placas microcontroladoras Arduino ha presentado este fin de semana cuatro nuevas placas de la familia Arduino...
En esta publicación explicaremos con la trasmisor de celda de carga HX711 de 5 kg y un Arduino UNO,...
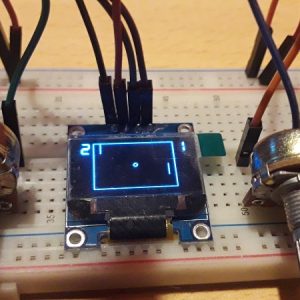
Esta vez les traigo este tradicional juego de antaño hecho con pocos componentes electrónicos, donde se vera a través...
Cuando queremos controlar servomotores a través de bluetooth, lo podemos realizar de la siguiente forma.Para controlar este servomotor a...
Después de haberme inspirado en los motores RYNO y otros scooters autoequilibrados de Segway, siempre quise construir algo parecido....









{kind=link}