


Hay muchos usos en los cuales son necesarios motores de corriente continua, en algunos de ellos sólo se necesita que el motor gire a una velocidad fija pero no son pocos donde se necesitan velocidades variables. Es muy común en juguetes, robótica u otras aplicaciones. Existen aplicaciones como las máquinas de enrollar donde la disponibilidad de varias velocidades es casi obligatoria; para los que enrollan conos de bocinas este circuito puede ser de gran ayuda. Hay diversos métodos de controlar la velocidad de motores de Corriente Continua, especialmente cuando son pequeños; el uso de resistores variables en serie con el motor para regular la cantidad de corriente entregada es el más sencillo pero a la vez es el quizás el peor porque es inestable, son necesarios resistores variable muy potentes y la velocidad es muy dependiente de la carga a la que se somete el motor. El circuito que aquí se presenta es es muy sencillo pero también es muy efectivo ya que regula la potencia que se entrega al motor de una forma mas o menos precisa por lo que es altamente recomendable.
Elementos a Utilizar
- IC1: LM555/NE555
- Q1: IRFZ44n,
- D1: 1N4148
- D2: 1N4148
- D3: 1N4007,
- C1: 10uF/25V
- C2: 0.1uF
- C3: 0.1uF
- C4: 0.1uF,
- P1: 100K (lineal)
- R1: 1K
- R2: 10R
- R3: 1K
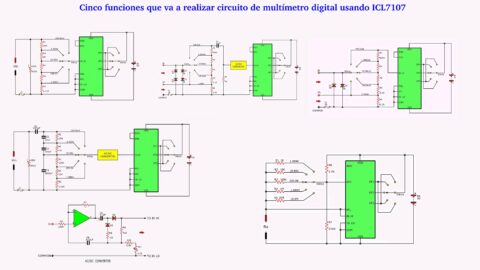
Diagrama

Funcionamiento
El circuito está formado por una parte de baja potencia donde IC1 se configura como un astable cuya frecuencia de oscilación depende de la posición del potenciómetro P1. Entonces P1 regula el tren de pulsos que se manda a la compuerta del MOSFET Q1 a través del resistor R2. La amplitud del pulso es de unos 12V (casi el mismo que la fuente), lo que hace que cada vez que llega a Q1 este se ponga en conducción haciendo que ese pulso llegue de forma amplificada al motor. Note que Q1 va ha actuar como si fuera un interruptor que conducirá o no de acuerdo a lo que establezca el pulso generado por IC1. Los condensadores C1 y C2 ayudarán a que IC1 trabaje de manera más estable y que no salgan ni entren ruidos desde o hasta el circuito oscilador, esto facilita que la frecuencia se mantenga constante según el valor establecido por P1 y así la velocidad del motor. Tenga en cuenta que D3 no juega ningún papel en el control de la velocidad pero actúa como una protección, especialmente cuando Q1 deja de conduccir; como el pulso en la compuerta G sube y cae muy rápido el motor recibirá frentes de subida y bajada muy rápidos lo cual puede generar efecto flyback y cambios de polaridad que D3 absorverá.
Consideraciones:
Si usa motores ya no tan pequeños debiera disipar Q1 que a pesar de ser un MOSFET puede generar calor. Conecte C1 y C2 lo más próximo que pueda a la entrada de alimentación de IC1 terminales 8: Vcc y 1: GND, por ningún motivo los omita. D3 nunca debe obviarse, puede ser casi cualquier diodo pero asegúrese de que sea de al menos 100V y 1A o más.
Referencia:
Curso Práctico de electrónica moderna cekit – 34 circuitos de electrónica
- Tutorial
- Circuitos

Publicación by Mikel is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 Internacional








){kind=link}
para motores grandes se debería disipar el Mosfet.
Asi es,además el diodo D3 debe ser de por lo menos de 100V y de 1Amper.